1.安装OpenCV
下载OpenCV:https://opencv.org/releases/
windows安装

下载完成后运行exe即可
2.springboot整合OpenCV
找到安装的OpenCV目录
opencv\build\java\opencv-460.jar
opencv\build\java\x64\opencv_java460.dll
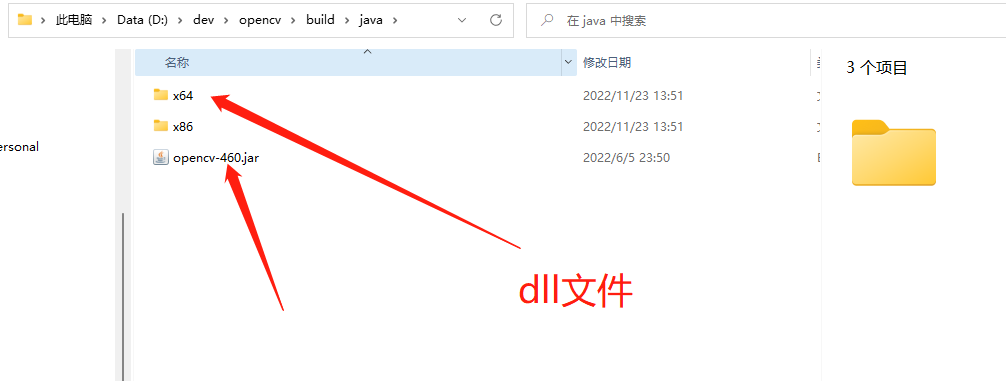
把jar包和dll放入lib文件夹下
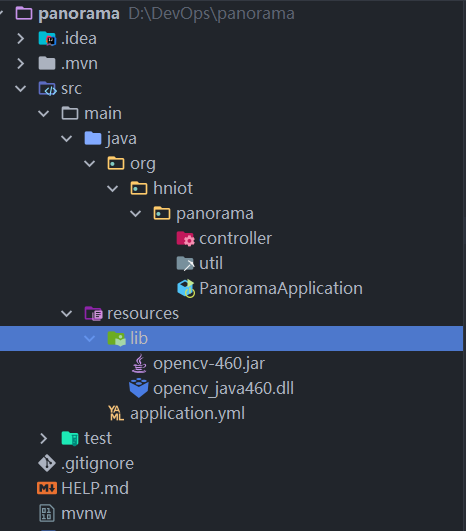
在项目中添加OpenCV依赖

pom.xml中引入依赖
<!-- OpenCV -->
<dependency>
<groupId>org</groupId>
<artifactId>opencv</artifactId>
<version>4.6.0</version>
<scope>system</scope>
<systemPath>${pom.basedir}\src\main\resources\lib\opencv-460.jar</systemPath>
</dependency>
<!-- build -->
<configuration>
<includeSystemScope>true</includeSystemScope>
</configuration>
3.实现全景图切割合并
ConverUtil
import org.opencv.core.*;
import org.opencv.imgproc.Imgproc;
import java.awt.image.BufferedImage;
import java.io.File;
public class OpenCVUtil {
static {
//Linux 环境
String opencvDllName = "D:/DevOps/panorama/src/main/resources/lib/opencv_java460.dll";
//Linux中so文件地址
//String opencvSoName = "/usr/local/share/java/opencv4/libopencv_java460.so";
System.load(opencvDllName);
}
double[][] imageTransform =
{
{0, 0},
{Math.PI / 2, 0},
{Math.PI, 0},
{-Math.PI / 2, 0},
{0, -Math.PI / 2},
{0, Math.PI / 2}
};
public static void main(String[] args) {
OpenCVUtil util = new OpenCVUtil();
BufferedImage buff = ConverUtil.bufferRead("C:\\Users\\awand\\Desktop\\20221123145514.jpg");
//全景图切割
Mat[] cube = util.shear(buff, 1024, 1024);
//预览图合成
Mat preview = util.mergeImage(cube, 512);
}
/**
* 全景图切割,返回6张图
* ossPanoPath oss存储地址
* panoImgPath 本地存储地址
*/
public Mat[] shear(BufferedImage buff, int targetWidth, int targetHeight) {
Mat mat = ConverUtil.bufferToMat(buff, buff.getType());
Mat[] cube = new Mat[6];
for (int i = 0; i < 6; i++) {
cube[i] = sideCubeMapImage(mat, i, targetWidth, targetHeight);
}
return cube;
}
/**
* @Description: 全景图切割,单面处理
* @Param: [source, sideId, sideWidth, sideHeight]
* @return: org.opencv.core.Mat
* @Author: XQD
* @Date:2021/10/22 13:51
*/
private Mat sideCubeMapImage(Mat source, final int sideId, final int sideWidth, final int sideHeight) {
Mat result = new Mat(sideWidth, sideHeight, source.type());
System.out.println("==========handle " + sideId + " start ===========");
// 获取图片的行列数量
float sourceWidth = source.cols();
float sourceHeight = source.rows();
//分配图的x,y轴
Mat mapx = new Mat(sideHeight, sideWidth, CvType.CV_32F);
Mat mapy = new Mat(sideHeight, sideWidth, CvType.CV_32F);
//计算相邻ak和相反an的三角形张成球体中心
final double an = Math.sin(Math.PI / 4);
final double ak = Math.cos(Math.PI / 4);
double ftu = imageTransform[sideId][0];
double ftv = imageTransform[sideId][1];
//对于每个图像计算相应的源坐标
for (int y = 0; y < sideHeight; y++) {
for (int x = 0; x < sideWidth; x++) {
//将坐标映射在平面上
float nx = (float) y / (float) sideHeight - 0.5f;
float ny = (float) x / (float) sideWidth - 0.5f;
nx *= 2;
ny *= 2;
// Map [-1, 1] plane coord to [-an, an]
// thats the coordinates in respect to a unit sphere
// that contains our box.
nx *= an;
ny *= an;
double u, v;
// Project from plane to sphere surface.
if (ftv == 0) {
// Center faces 中心面
u = Math.atan2(nx, ak);
v = Math.atan2(ny * Math.cos(u), ak);
u += ftu;
} else if (ftv > 0) {
// Bottom face 低面
double d = Math.sqrt(nx * nx + ny * ny);
v = Math.PI / 2 - Math.atan2(d, ak);
u = Math.atan2(ny, nx);
} else {
// Top face 顶面
//cout << "aaa";
double d = Math.sqrt(nx * nx + ny * ny);
v = -Math.PI / 2 + Math.atan2(d, ak);
u = Math.atan2(-ny, nx);
}
// Map from angular coordinates to [-1, 1], respectively.
u = u / (Math.PI);
v = v / (Math.PI / 2);
// Warp around, if our coordinates are out of bounds.
while (v < -1) {
v += 2;
u += 1;
}
while (v > 1) {
v -= 2;
u += 1;
}
while (u < -1) {
u += 2;
}
while (u > 1) {
u -= 2;
}
// Map from [-1, 1] to in texture space
u = u / 2.0f + 0.5f;
v = v / 2.0f + 0.5f;
u = u * (sourceWidth - 1);
v = v * (sourceHeight - 1);
mapx.put(x, y, u);
mapy.put(x, y, v);
}
}
// Do actual using OpenCV's remap
Imgproc.remap(source, result, mapx, mapy, Imgproc.INTER_LINEAR, Core.BORDER_CONSTANT, new Scalar(0, 0, 0));
// 均值模糊(降噪)
Mat image = source.clone();
Imgproc.blur(source, image, new Size(3,3),new Point(-1,-1));
if (sideId == 0) {
ConverUtil.matSave("D:\\panorama\\a.jpg", result);
} else if (sideId == 1) {
ConverUtil.matSave("D:\\panorama\\b.jpg", result);
} else if (sideId == 2) {
ConverUtil.matSave("D:\\panorama\\c.jpg", result);
} else if (sideId == 3) {
ConverUtil.matSave("D:\\panorama\\d.jpg", result);
} else if (sideId == 4) {
//旋转角度
result = ConverUtil.rotateRight(result, 1);
ConverUtil.matSave("D:\\panorama\\e.jpg", result);
} else if (sideId == 5) {
//旋转角度
result = ConverUtil.rotateRight(result, 0);
ConverUtil.matSave("D:\\panorama\\f.jpg", result);
}
System.out.println("==========handle " + sideId + " over ===========");
return result;
}
/**
* 全景预览图合成
*/
public Mat mergeImage(Mat[] cube, int width) {
Mat mat = new Mat(width * cube.length, width, cube[0].type());
for (int i = 0; i < cube.length; i++) {
Mat side = ConverUtil.matResize(cube[i], 512, 512);
mat.put(i * 512, 0, getByte(side));
}
ConverUtil.matSave("D:\\panorama\\preview.jpg", mat);
return mat;
}
public byte[] getByte(Mat mat) {
int width = mat.cols();
int height = mat.rows();
int dims = mat.channels();
byte[] rgbdata = new byte[width * height * dims];
mat.get(0, 0, rgbdata);
return rgbdata;
}
}
OpenCVUtil
import org.opencv.core.*;
import org.opencv.imgproc.Imgproc;
import java.awt.image.BufferedImage;
import java.io.File;
public class OpenCVUtil {
static {
//Linux 环境
String opencvDllName = "D:/DevOps/panorama/src/main/resources/lib/opencv_java460.dll";
//Linux中so文件地址
//String opencvSoName = "/usr/local/share/java/opencv4/libopencv_java460.so";
System.load(opencvDllName);
}
double[][] imageTransform =
{
{0, 0},
{Math.PI / 2, 0},
{Math.PI, 0},
{-Math.PI / 2, 0},
{0, -Math.PI / 2},
{0, Math.PI / 2}
};
public static void main(String[] args) {
OpenCVUtil util = new OpenCVUtil();
BufferedImage buff = ConverUtil.bufferRead("C:\\Users\\awand\\Desktop\\20221123145514.jpg");
//全景图切割
Mat[] cube = util.shear(buff, 1024, 1024);
//预览图合成
Mat preview = util.mergeImage(cube, 512);
}
/**
* 全景图切割,返回6张图
* ossPanoPath oss存储地址
* panoImgPath 本地存储地址
*/
public Mat[] shear(BufferedImage buff, int targetWidth, int targetHeight) {
Mat mat = ConverUtil.bufferToMat(buff, buff.getType());
Mat[] cube = new Mat[6];
for (int i = 0; i < 6; i++) {
cube[i] = sideCubeMapImage(mat, i, targetWidth, targetHeight);
}
return cube;
}
/**
* @Description: 全景图切割,单面处理
* @Param: [source, sideId, sideWidth, sideHeight]
* @return: org.opencv.core.Mat
* @Author: XQD
* @Date:2021/10/22 13:51
*/
private Mat sideCubeMapImage(Mat source, final int sideId, final int sideWidth, final int sideHeight) {
Mat result = new Mat(sideWidth, sideHeight, source.type());
System.out.println("==========handle " + sideId + " start ===========");
// 获取图片的行列数量
float sourceWidth = source.cols();
float sourceHeight = source.rows();
//分配图的x,y轴
Mat mapx = new Mat(sideHeight, sideWidth, CvType.CV_32F);
Mat mapy = new Mat(sideHeight, sideWidth, CvType.CV_32F);
//计算相邻ak和相反an的三角形张成球体中心
final double an = Math.sin(Math.PI / 4);
final double ak = Math.cos(Math.PI / 4);
double ftu = imageTransform[sideId][0];
double ftv = imageTransform[sideId][1];
//对于每个图像计算相应的源坐标
for (int y = 0; y < sideHeight; y++) {
for (int x = 0; x < sideWidth; x++) {
//将坐标映射在平面上
float nx = (float) y / (float) sideHeight - 0.5f;
float ny = (float) x / (float) sideWidth - 0.5f;
nx *= 2;
ny *= 2;
// Map [-1, 1] plane coord to [-an, an]
// thats the coordinates in respect to a unit sphere
// that contains our box.
nx *= an;
ny *= an;
double u, v;
// Project from plane to sphere surface.
if (ftv == 0) {
// Center faces 中心面
u = Math.atan2(nx, ak);
v = Math.atan2(ny * Math.cos(u), ak);
u += ftu;
} else if (ftv > 0) {
// Bottom face 低面
double d = Math.sqrt(nx * nx + ny * ny);
v = Math.PI / 2 - Math.atan2(d, ak);
u = Math.atan2(ny, nx);
} else {
// Top face 顶面
//cout << "aaa";
double d = Math.sqrt(nx * nx + ny * ny);
v = -Math.PI / 2 + Math.atan2(d, ak);
u = Math.atan2(-ny, nx);
}
// Map from angular coordinates to [-1, 1], respectively.
u = u / (Math.PI);
v = v / (Math.PI / 2);
// Warp around, if our coordinates are out of bounds.
while (v < -1) {
v += 2;
u += 1;
}
while (v > 1) {
v -= 2;
u += 1;
}
while (u < -1) {
u += 2;
}
while (u > 1) {
u -= 2;
}
// Map from [-1, 1] to in texture space
u = u / 2.0f + 0.5f;
v = v / 2.0f + 0.5f;
u = u * (sourceWidth - 1);
v = v * (sourceHeight - 1);
mapx.put(x, y, u);
mapy.put(x, y, v);
}
}
// Do actual using OpenCV's remap
Imgproc.remap(source, result, mapx, mapy, Imgproc.INTER_LINEAR, Core.BORDER_CONSTANT, new Scalar(0, 0, 0));
// 均值模糊(降噪)
Mat image = source.clone();
Imgproc.blur(source, image, new Size(3,3),new Point(-1,-1));
if (sideId == 0) {
ConverUtil.matSave("D:\\panorama\\a.jpg", result);
} else if (sideId == 1) {
ConverUtil.matSave("D:\\panorama\\b.jpg", result);
} else if (sideId == 2) {
ConverUtil.matSave("D:\\panorama\\c.jpg", result);
} else if (sideId == 3) {
ConverUtil.matSave("D:\\panorama\\d.jpg", result);
} else if (sideId == 4) {
//旋转角度
result = ConverUtil.rotateRight(result, 1);
ConverUtil.matSave("D:\\panorama\\e.jpg", result);
} else if (sideId == 5) {
//旋转角度
result = ConverUtil.rotateRight(result, 0);
ConverUtil.matSave("D:\\panorama\\f.jpg", result);
}
System.out.println("==========handle " + sideId + " over ===========");
return result;
}
/**
* 全景预览图合成
*/
public Mat mergeImage(Mat[] cube, int width) {
Mat mat = new Mat(width * cube.length, width, cube[0].type());
for (int i = 0; i < cube.length; i++) {
Mat side = ConverUtil.matResize(cube[i], 512, 512);
mat.put(i * 512, 0, getByte(side));
}
ConverUtil.matSave("D:\\panorama\\preview.jpg", mat);
return mat;
}
public byte[] getByte(Mat mat) {
int width = mat.cols();
int height = mat.rows();
int dims = mat.channels();
byte[] rgbdata = new byte[width * height * dims];
mat.get(0, 0, rgbdata);
return rgbdata;
}
}



